


KuupKulgur Payload Testing Platform
KuupKulgur Payload testing platform is a flexible and modular rover system that allows for easy interfacing with potential payloads. The novel aspect of this platform is its capability to support payloads and instruments that are in low-level development and bringing them to relevant testing environments, such as the Lunar analog facility at Tartu Observatory.
Specifications


Envelope Dimensions (mm)
417 x 286 x 239
Payload interface Bracket (mm)
Mass (kg)
Power Capacity (Wh)
Estimated Operation Lifetime
Supported Voltage for Distribution (V)
Platform
Power Systems
Battery Type
Processing Systems
On-board Processing Unit
Communication Interfaces
SPI/I2C/UART
Operating System
Robot Operating System Support
200 x 120
4.926
120 mins
111
3.3/5/12/20 (over USB-C)
3.7V Li-ion cells (x5)
Nvidia Jetson Orin Nano/ Xavier
Linux / Unix
ROS1 / ROS2
Yes
WiFi
Yes
Sensor Suite
Inertial Measurement
Camera System
Wheel Encoders
IMX219-160 Camera, 160° FOV
Hall encoders (x6)
6-axis IMU
Estimated Standby Lifetime
300 mins
Payload Interface


KuupKulgur Payload testing platform utilizes a standardized cheese-plate design for mechanical interfaces with payloads. This allows us flexibility incorporating instruments of different shapes and sizes.
Instruments can directly be interfaced to the shared 40-pin bus of the on-board processing Jetson unit (Orin Nano / Xavier) to communicate and share data. Since ROS is used for robotic operations, a simple ROS node for the instrument data can be used to collect time-stamped packages together with KuupKulgur's on-board sensor suite.
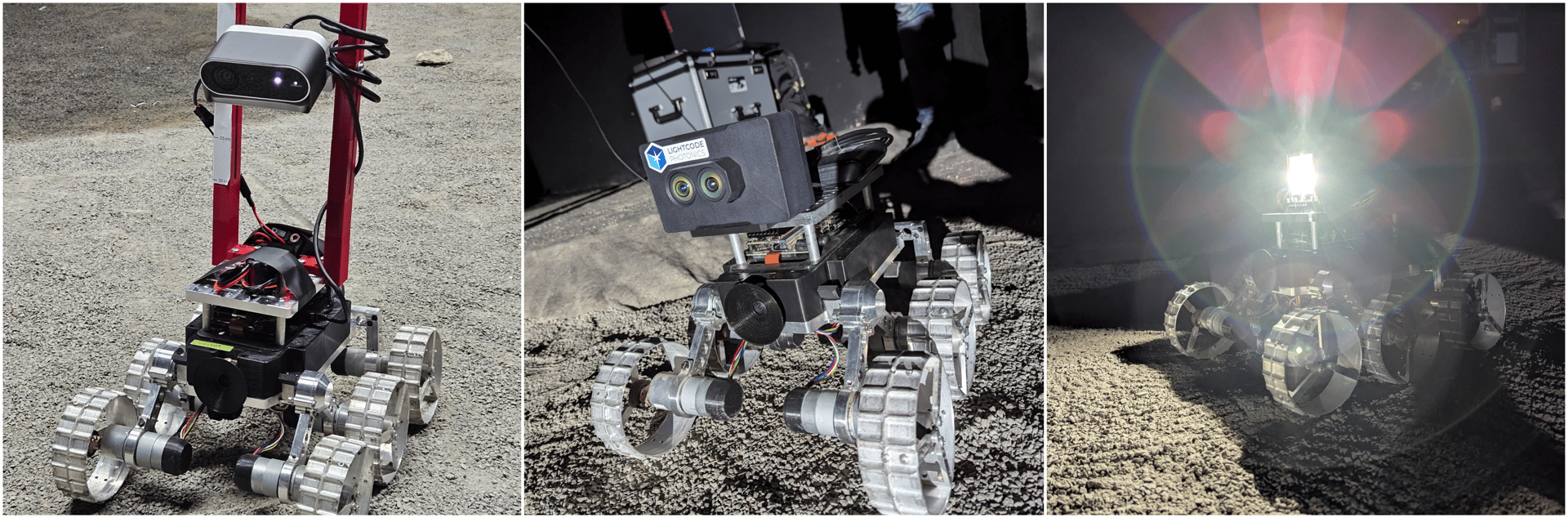
Payload Testing Platform
KuupKulgur payload testing platform has completed successful payload / instrument tests with our partners. These include a variety of instruments from camera systems, time of flight 3D imagers to innovative light sources for future Lunar rover missions.

Supported by: